Edexcel A Level Further Maths: Core Pure:复习笔记2.2.2 Geometric Transformations with Matrices

2D Transformations
What is meant by a 2D geometric transformation?
- The following transformations can be represented (in 2D) using multiplication of a 2x2 matrix
- rotations (about the origin)
- reflections
- enlargements
- (horizontal) stretches parallel to the x-axis
- (vertical) stretches parallel to the y-axis
What are the matrices for geometric transformations?
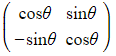
- Rotation
- Anticlockwise (or counter-clockwise) through angle θ about the origin
- This is given in the formula booklet
- Clockwise through angle θ about the origin
- In both cases
- θ > 0
- θ may be measured in degrees or radians
- Anticlockwise (or counter-clockwise) through angle θ about the origin
- Reflection
- In the line

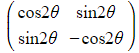
- This is given in the formula booklet
- θ may be measured in degrees or radians
- for a reflection in the x-axis, θ = 0° (0 radians)
- for a reflection in the y-axis, θ = 90° (π/2 radians)
- In the line
- Enlargement
- Scale factor k, centre of enlargement at the origin (0, 0)
- Scale factor k, centre of enlargement at the origin (0, 0)
- Horizontal stretch (or stretch parallel to the x-axis)
- Scale factor k
- Scale factor k
- Vertical stretch (or stretch parallel to the y-axis)
- Scale factor k
- Scale factor k



How do I find the matrix of a 2D transformation?
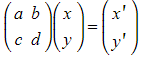
- Let the transformation matrix be

- The image of the point (x, y) after the transformation is (x', y') which can be found by:
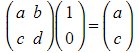
- You can find the values of a, b, c, d by seeing where the points (1, 0) and (0, 1) are transformed
- (1, 0) is transformed to (a, c)
- (0, 1) is transformed to (b, d)
- (1, 0) is transformed to (a, c)
Worked Example
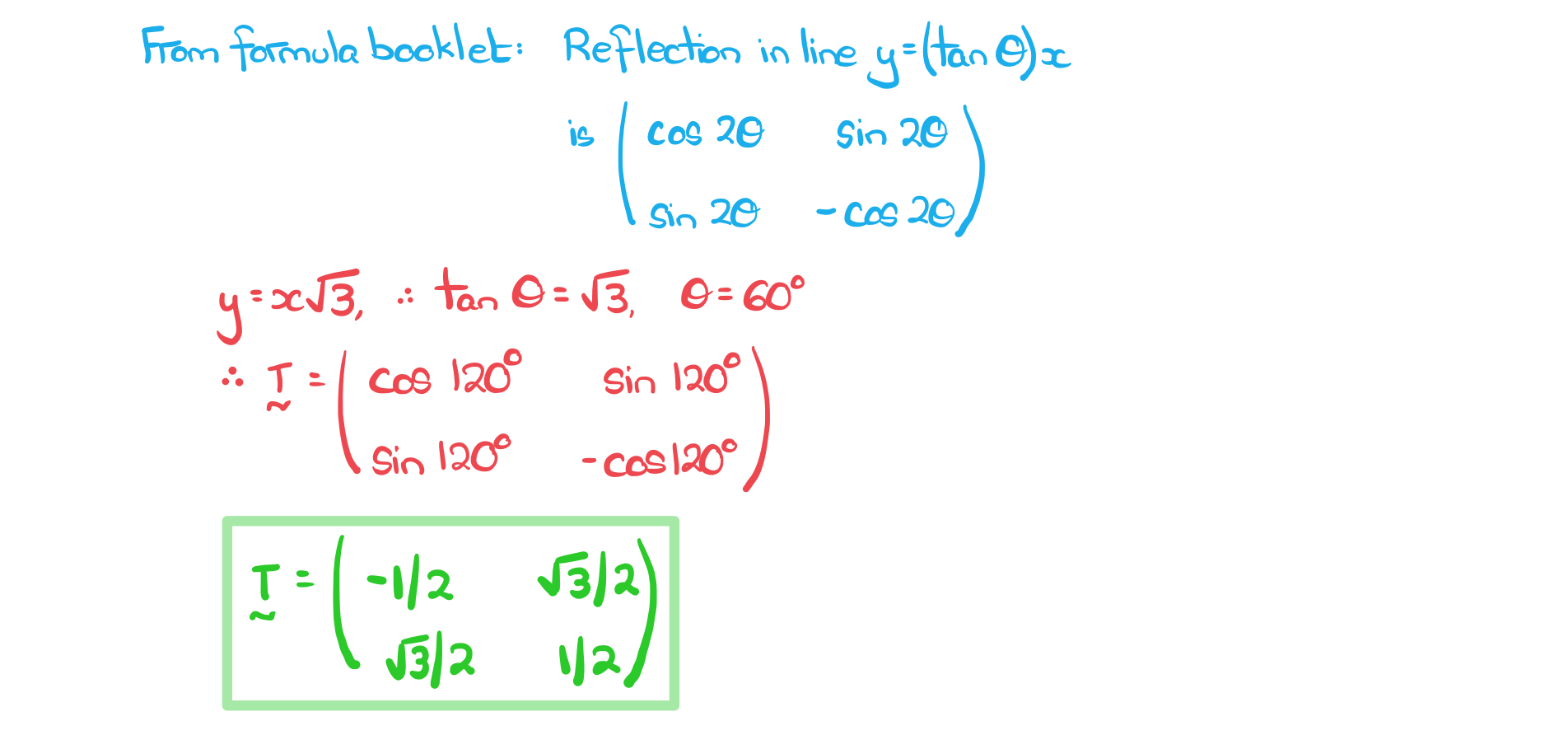
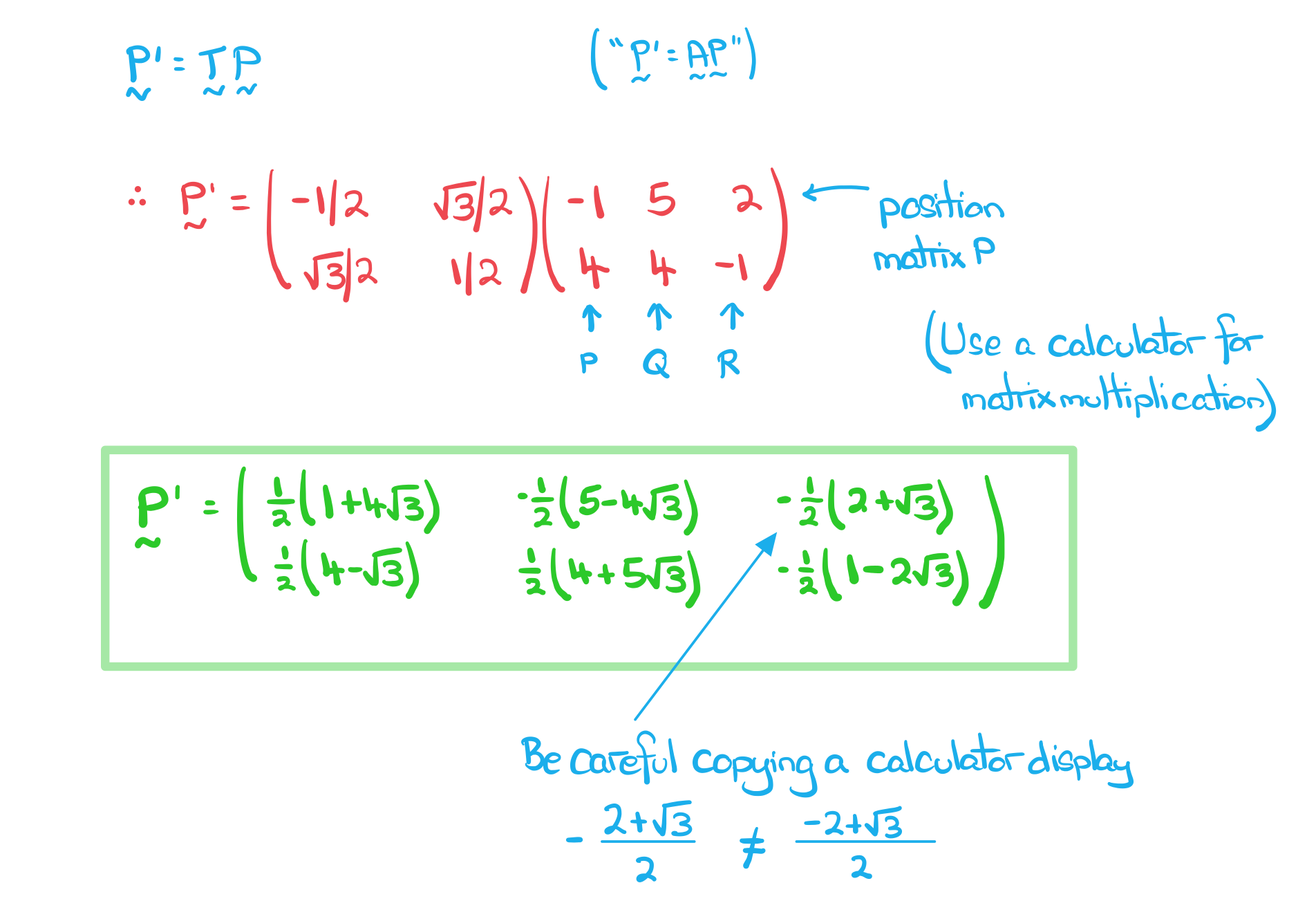
Triangle PQR has coordinates P(-1, 4), Q(5, 4) and R(2, -1).
The transformation T is a reflection in the line ![]() .
.
Successive Transformations
The order in which transformations occur can lead to different results – for example a reflection in the x-axis followed by clockwise rotation of 90° is different to rotation first, followed by the reflection.
Therefore, when one transformation is followed by another order is critical.
What is a composite transformation?
- A composite function is the result of applying more than one function to a point or set of points
- e.g. a rotation, followed by an enlargement
- It is possible to find a single composite function matrix that does the same job as applying the individual transformation matrices
How do I find a single matrix representing a composite transformation?
- Multiplication of the transformation matrices
- However, the order in which the matrices is important
- If the transformation represented by matrix M is applied first, and is then followed by another transformation represented by matrix N
- the composite matrix is NM
e. P’ = NMP
(NM is not necessarily equal to MN) - The matrices are applied right to left
- The composite function matrix is calculated left to right
- the composite matrix is NM
- Another way to remember this is, starting from P, always pre-multiply by a transformation matrix
- This is the same as applying composite functions to a value
- The function (or matrix) furthest to the right is applied first
- If the transformation represented by matrix M is applied first, and is then followed by another transformation represented by matrix N
How do I apply the same transformation matrix more than once?
- If a transformation, represented by the matrix T, is applied twice we would write the composite transformation matrix as T2
- T2 = TT
- This would be the case for any number of repeated applications
- T5 would be the matrix for five applications of a transformation
- A calculator can quickly calculate T2, T5, etc
- Problems may involve considering patterns and sequences formed by repeated applications of a transformation
- The coordinates of point(s) follow a particular pattern
- (20, 16) – (10, 8) – (5, 4) – (2.5, 2) …
- The area of a shape increases/decreases by a constant factor with each application
- The coordinates of point(s) follow a particular pattern
e.g. if one transformation doubles the area then three applications will increase the (original) area eight times (23)
Exam Tip
- When performing multiple transformations on a set of points, make sure you put your transformation matrices in the correct order, you can check this in an exam but sketching a diagram and checking that the transformed point ends up where it should
- You may be asked to show your workings but you can still check that you have performed you matrix multiplication correctly by putting it through your calculator
Worked Example
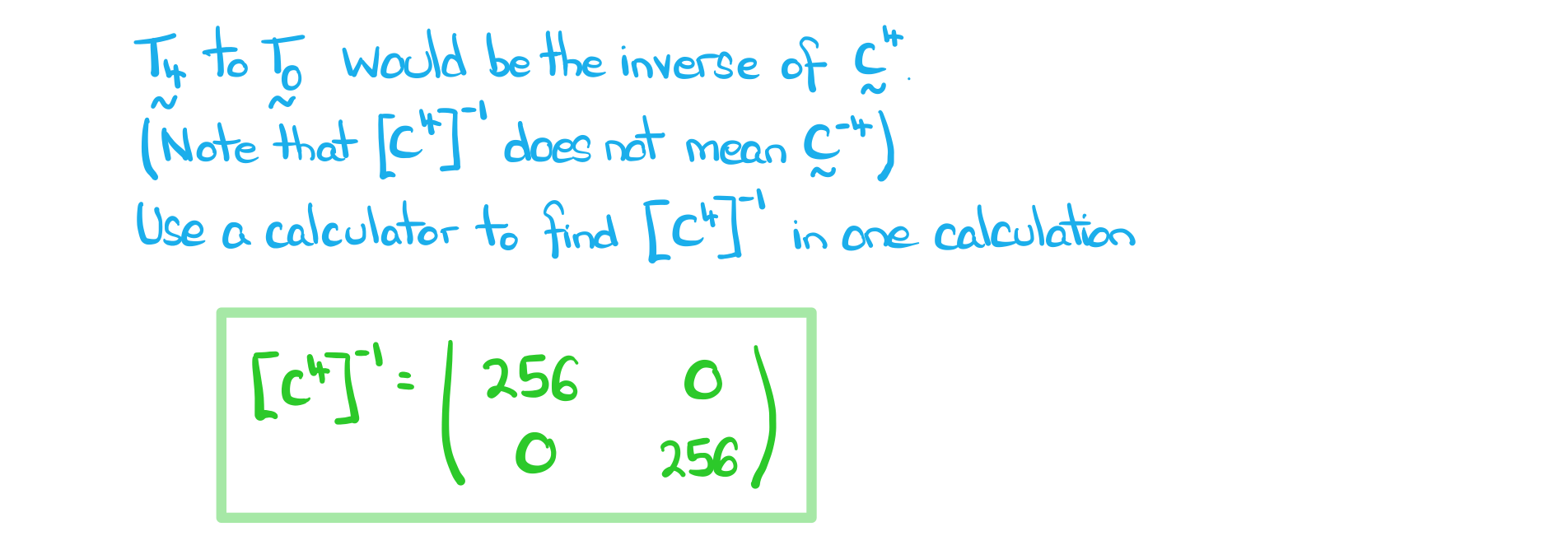
The matrix E represents an enlargement with scale factor 0.25, centred on the origin.
The matrix R represents a rotation, 90° anticlockwise about the origin.
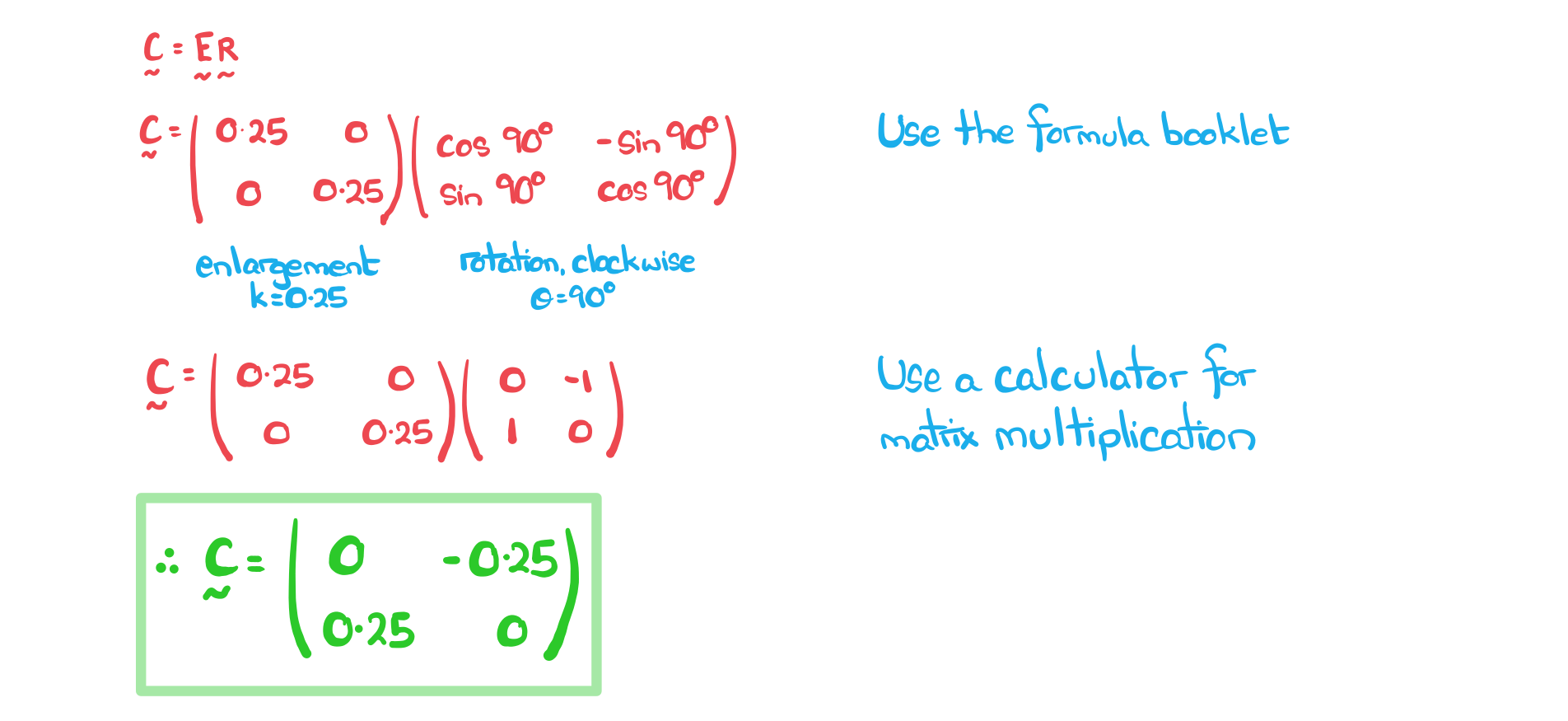
 . Tn represents the position matrix of the image square after it has been transformed n times by matrix C. Find T4
. Tn represents the position matrix of the image square after it has been transformed n times by matrix C. Find T4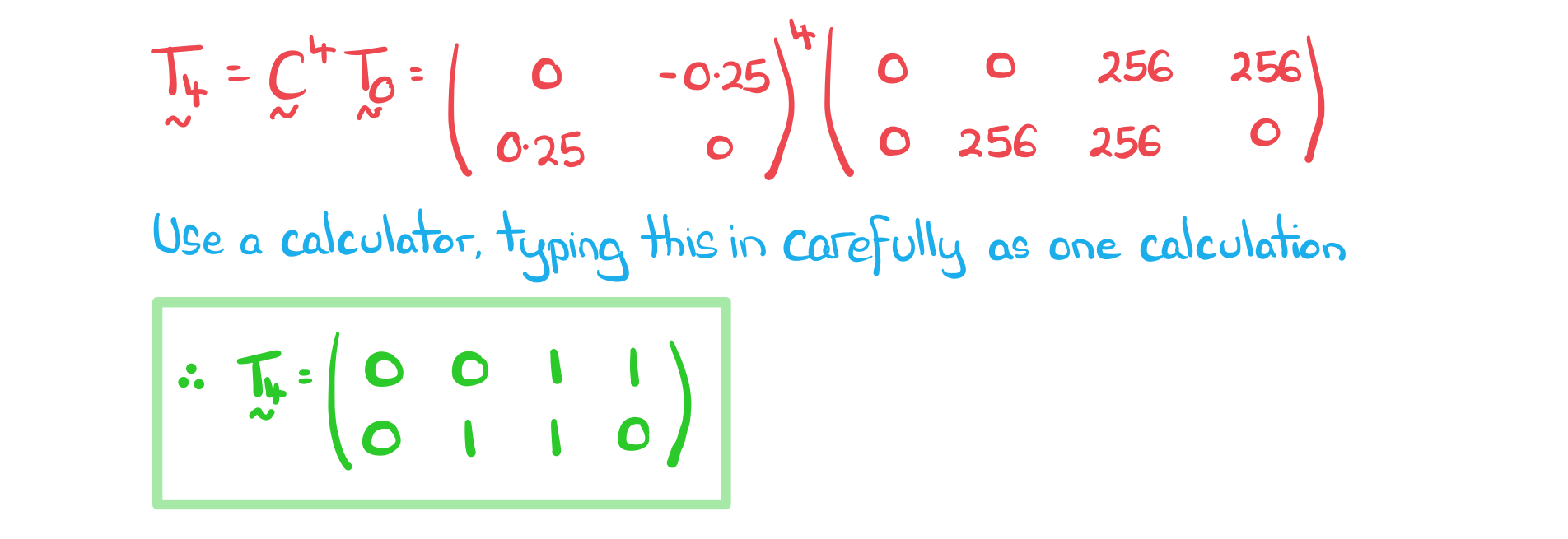
3D Transformations
Transforming 3D coordinates with matrices
- We can apply transformations to coordinates in 3D the same way that we apply them in 2D
- We do this by multiplying the transformation matrix by the position vector we wish to transform
- Rather than transforming 2x1 matrices (2D position vectors) we are now transforming 3x1 matrices (3D position vectors),

- You can group together coordinates into a larger position matrix
- For example, all four vertices of a rectangle in 3D can become a 3x4 position matrix,
- This is helpful as you can transform the entire shape in one matrix multiplication
- For example, all four vertices of a rectangle in 3D can become a 3x4 position matrix,
- You can group together coordinates into a larger position matrix
- 3D transformations will be confined to
- A reflection in one of x=0, y=0, or z=0
- A rotation about one of the coordinate axes
- As with 2D transformations, the transformation matrix describes how the unit vectors in each direction (i, j, and k) are mapped
- For a transformation matrix T,

- The image of

- The images of
 are the 2nd and 3rd columns of T respectively
are the 2nd and 3rd columns of T respectively
- The image of
- For a transformation matrix T,
Reflection matrices in 3D
- A reflection in the plane x=0 is given by the matrix

- Notice that the first column, the image of i, is multiplied by -1, or ‘mirrored’, whilst j and k stay the same
- A reflection in the plane y=0 is given by

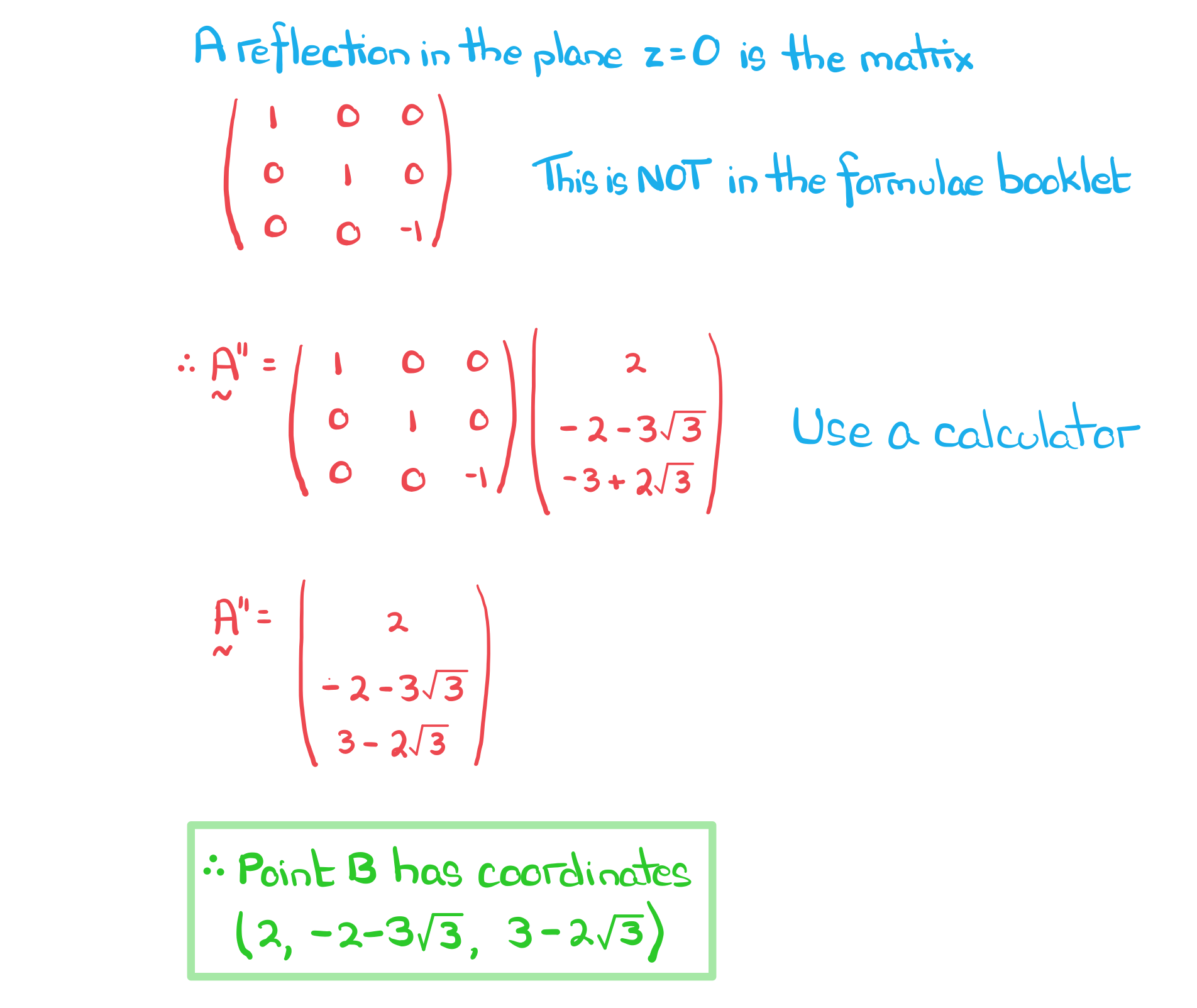
- A reflection in the plane z=0 is given by

- You are not given these transformation matrices in the formula book
Rotation matrices in 3D
- An anticlockwise rotation around the z-axis by angle θ is given by
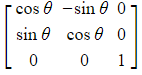
- Notice that the z coordinate of a point would be unchanged by this transformation
- This makes it equivalent to a rotation around the origin in 2D
- Therefore the top left corner of this matrix is the same as the 2x2 matrix for an anticlockwise rotation around the origin, given in the formula book
- An anticlockwise rotation around the x-axis by angle θ is given by
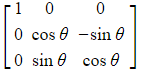
- Notice that the x coordinate is unaffected
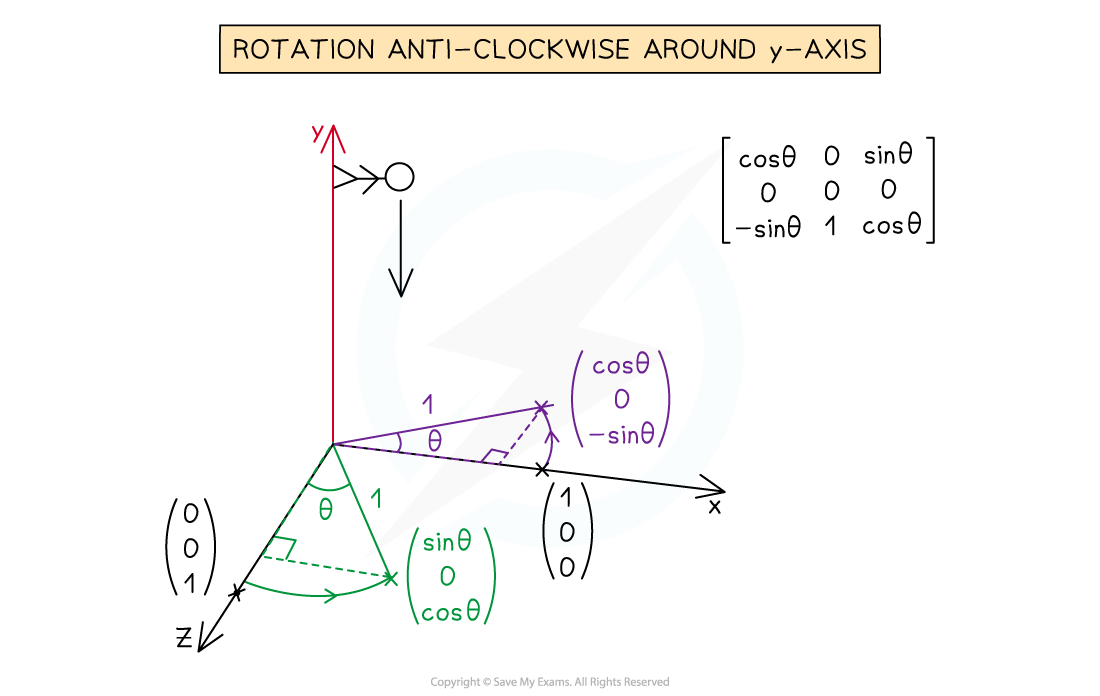
- An anticlockwise rotation around the y-axis by angle θ is given by
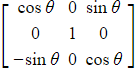
- Notice that the y coordinate is unaffected
- When we describe an “anticlockwise rotation around the x/y/z-axis” this is from the perspective of standing on the positive axis in question, looking towards the origin
- You are not given these transformation matrices in the formula book
- You are however given the matrix for an anticlockwise rotation about the origin in 2D, which may be useful;
- You are however given the matrix for an anticlockwise rotation about the origin in 2D, which may be useful;
Exam Tip
- When describing a rotation, remember to state the axis and direction of rotation
- Use your calculator where possible for matrix multiplication, or checking your answer to matrix multiplication if required to show working
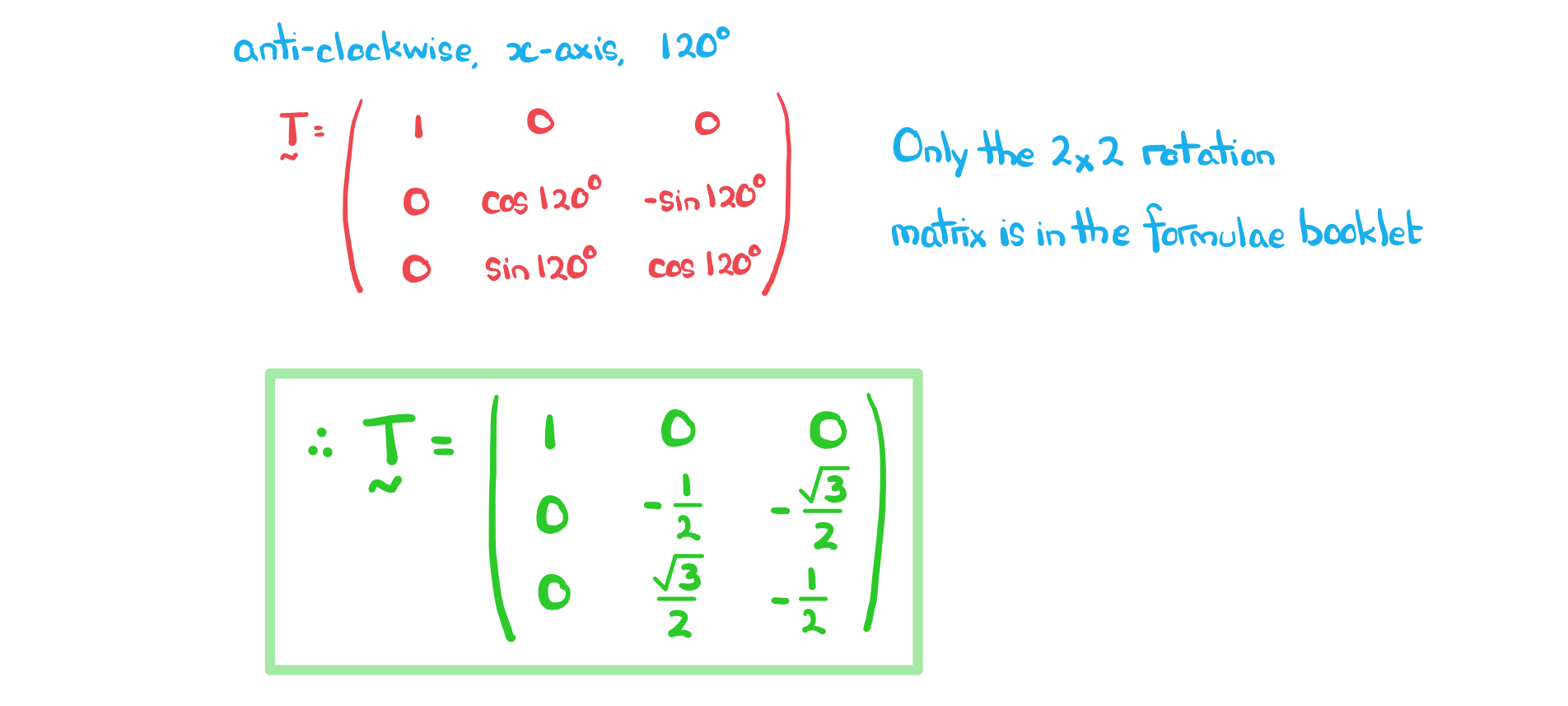
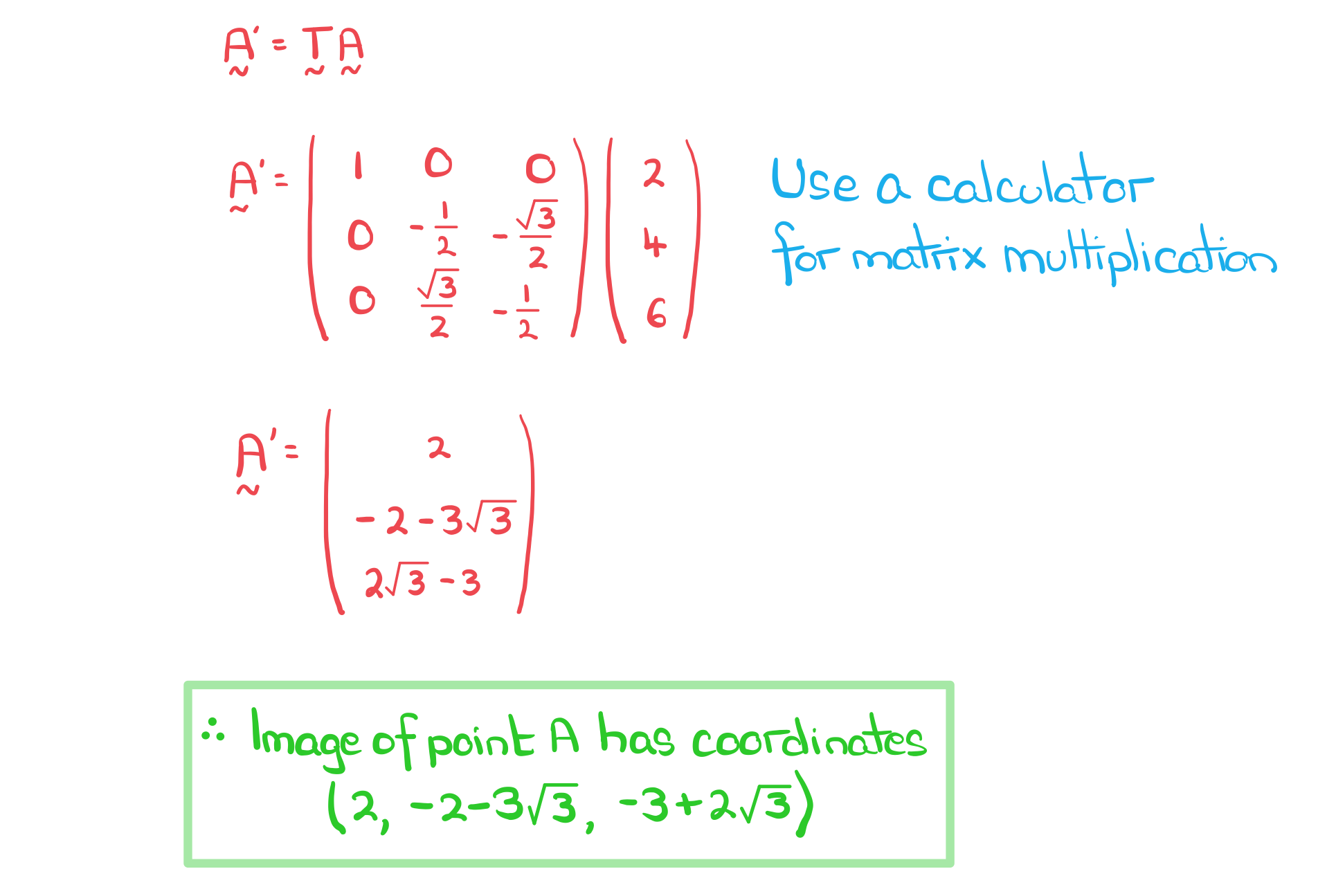
Worked Example
The 3x3 matrix T, represents an anticlockwise rotation around the x-axis by 120⁰.
转载自savemyexams